Metallbaukasten

|
Metallbaukasten |
|
Home |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Tronico ist ein System mit 10mm-Rastermaß, welches ausschließlich Bausätze, jedoch keine einzelnen Konstruktionsteile zur Verfügung stellt. Mit diesem System ist eine Motorisierung nicht machbar. Es ist deshalb naheliegend, den Antrieb mit den Teilen eines anderen Systems mit 10mm-Raster zu realisieren, z. B. mit dem deutschen Eitech oder dem tschechischen Merkur. Allerdings liegen meinerseits weder Erfahrungen mit beiden Systemen vor noch wollte ich für ein Projekt mit zweifelhaftem Ausgang Teile eines weiteren Systems anhäufen. Zeitweise habe ich daran gedacht, den Antrieb vollständig mit selbstgemachten Teilen bzw. Teilen aus dem allgemeinen Modellbau zu konstruieren, das war mir letztendlich aber zu aufwändig. So wurde das Projekt, den Tronico-Unimog zu motorisieren, immer wieder hinausgeschoben. Als gelegentlicher Zuschauer der beliebten Trödelshow Bares für Rares hatte ich irgendwann den Begriff "Marriage" aufgeschnappt - eine Bezeichnung, die zuweilen im Zusammenhang für zusammengesetzte Schmuckstücke verwendet wird. Das brachte mich schließlich auf die Idee, ebenfalls einmal eine Marriage auszuprobieren - und zwar aus der Kombination eines Antrieb aus dem vielfältigen Teilesortiment des ½-Zoll-Systems mit dem Aufbau des Tronico-Unimogs. Wenngleich bei einem Modell dieser geringen Größe die Funktionalität zwangsläufig begrenzt ist und die Teile des ½-Zoll-Systems zudem relativ klobig wirken, sollten doch wenigstens die wichtigsten Merkmale eines Unimogs implementiert werden: 2 pendelnd aufgehängte Portalachsen und Allradantrieb. Im Laufe der Konstruktion stellte sich heraus, dass sogar noch eine einfache motorbetriebene Kippmechanik für die Ladefläche untergebracht werden konnte. Konstruktive Vorgaben Der Unterbau des Tronico-Unimogs besteht aus schwarzem Material und und konsequenterweise hätte man auch für das Fahrgestell schwarzes ½-Zoll-Material verwenden müssen. Dieses wurde jedoch vor einigen Jahren verkauft und eine Wiederbeschaffung oder eine Umlackierung vorhandener Teile kam nicht in Frage. Da das Fahrerhaus und die Ladefläche aus grünem Material bestehen, ist ein Fahrgestell aus grünen Teilen aber durchaus akzeptabel. Auch wenn sich die Farbtöne geringfügig unterscheiden und zudem einige rote Lagerplatten verbaut wurden, bleibt die schwarz-grüne Farbgebung des Originals weitgehend erhalten. Zunächst wurde der Unimog vermessen und mit Hilfe eines provisorischen Leiterrahmens untersucht, inwieweit die Breite von ca. 160mm mit einem Antrieb aus Teilen des ½-Zoll-Systems eingehalten werden konnte. Insgesamt waren 3 Differenziale vorgesehen, von denen das Achsdifferenzial für die Vorderräder aufgrund der erforderlichen Kardangelenke besonders schmal sein musste. Ein Stirnrad-Differenzial für ein 1:16-Modell hatte ich zwar bereits gebaut, dies hatte jedoch eine komfortable Breite von 48mm - zu viel für den Unimog. Sämtliche Zahnräder einer Achse sollten jeweils in einer Art Rahmen (nachfolgend als "Achsrahmen" bezeichnet) der Abmessungen 3 Loch x 7 Loch konzentriert werden, welcher um seine Längsachse pendeln konnte und als komplette Achseneinheit einfach montierbar war. Die Breite eines solchen Achsrahmens beträgt ca. 45mm. Zwischen den beiden Achsrahmen war das Zwischendifferenzial anzuordnen, von dem die Antriebskraft beidseitig auf ein sich im Achsrahmen befindendes Zahnrad übertragen wird. Wenn die Achse dieses Zahnrades mit der Drehachse des Achsrahmens fluchtet, dann bleibt der Abstand zwischen den zu koppelnden Zahnrädern beim Pendeln stets gleich - eine Konstruktion, die sich in ähnlicher Form bereits in anderen Modellen bewährt hatte.
160mm abzüglich der Breite des Achsrahmens von etwa 45mm sowie der Länge zweier Kardangelenke von insgesamt 46mm bleiben für jeden Achsschenkel mit Rad nur ca. 35mm übrig. Ein ehrgeiziges Ziel, welches nur erreichbar war, wenn ein Teil des Achsschenkels in der Felge des Rades verschwindet - die Felgen waren also entsprechend auszufräsen. Da anfangs nicht sicher war, ob die geplante Motorisierung überhaupt Aussicht auf Erfolg hatte, wollte ich die Original-Räder nicht leichtfertig verunstalten und habe deshalb Räder passender Größe aus dem allgemeinen Modellbau beschafft. Diese haben sich im Nachhinein für das Gewicht jedoch als zu weich erwiesen, sodass die Original-Räder schließlich doch bearbeitet werden mussten.
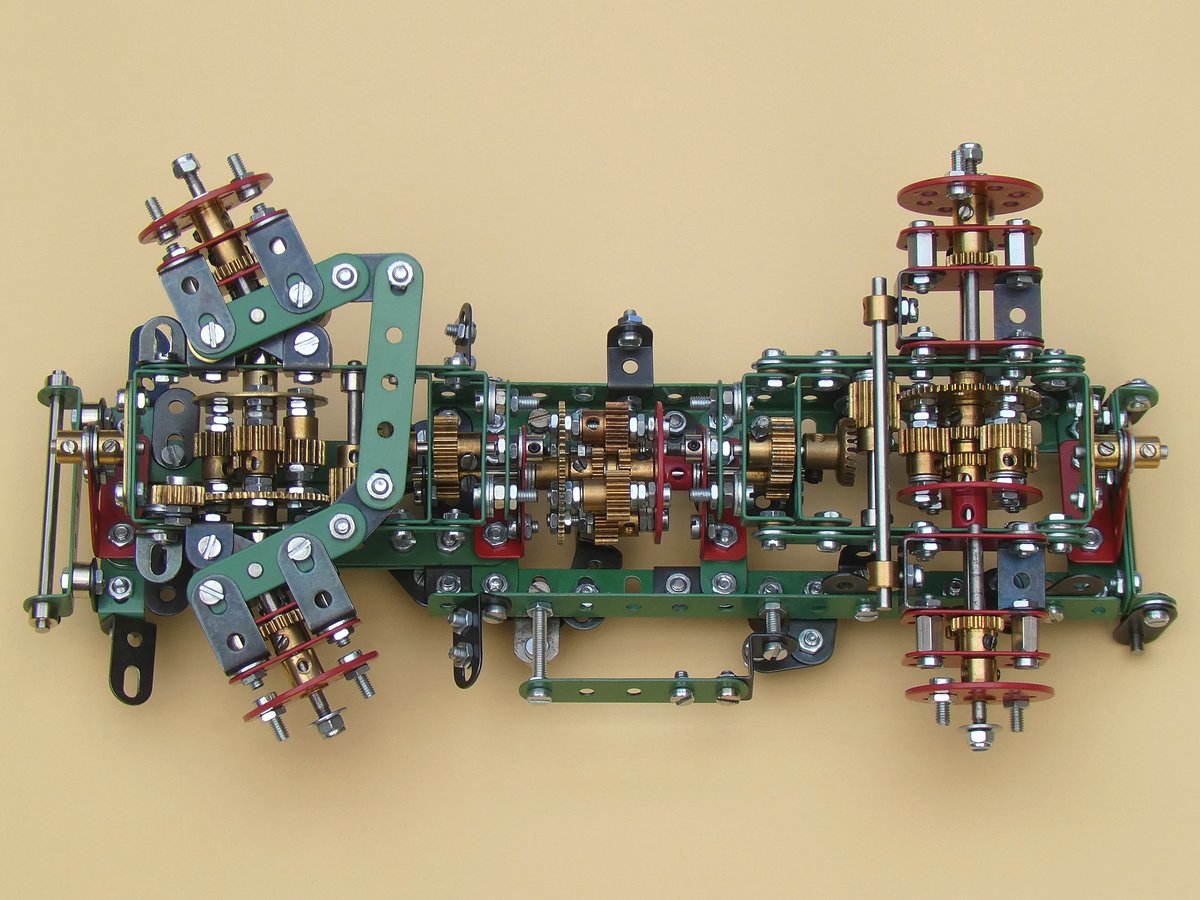
Letztendlich sollten die vom Tronico-Unimog verwendeten Teile möglichst ohne Änderungen montierbar sein, um gegebenenfalls einen einfachen Rückbau zu erlauben. Auch diese Vorgabe konnte durch entsprechend angeordnete Aufnahmen und Befestigungen weitestgehend erfüllt werden. Lediglich die Rückwand des Fahrerhauses war geringfügig zu modifizieren, um eine Antriebswelle hindurchführen zu können, und die vorderen Kotflügel mussten etwas gespreizt werden, um eine zufriedenstellende Verschränkung der Achsen zu erreichen. Mit Ausnahme der 4 Räder konnten weitere 9 Teile des Tronico-Unimogs nahezu unverändert auf bzw. an das Fahrgestell montiert werden. Die praktische Realisierung Das Grundgerüst bildet ein Leiterrahmen mit einer Länge von 22 Loch. Er enthält die Lagerungen für die Pendelachsen und das Zwischendifferenzial sowie diverse Befestigungspunkte zur Aufnahme der Tronico-Anbauteile, des Antriebsblocks, der Kippmechanik und der Federung. Die Befestigungen für die Fernsteuerkomponenten sind auf den folgenden Bildern noch nicht zu sehen, da deren Größe und geeignete Positionen zu diesem Zeitpunkt noch unbekannt waren. Die Lagerungen für die Pendelachsen wurden so montiert, dass der motorisierte Unimog die Höhe des Originals erreicht. Sie sind so auszurichten, dass eine lange Welle idealerweise möglichst leicht durch alle fluchtenden Bohrungen geschoben werden kann.
Jeder Achsrahmen wird mit einem Differenzial sowie einem 90°-Winkeltrieb bestückt.
Der Winkeltrieb besteht aus einem ½ Zoll breiten 19Z-Ritzel (½" face) in Verbindung mit einem 25Z-Kronrad, welches seinerseits von einem 25Z-Ritzel angetrieben wird. Dessen Drehachse fluchtet mit der Aufhängung der Pendelachse, ist jedoch mechanisch von dieser entkoppelt. Da die Halbwellen des Vorderachs-Differenzials aufgrund der schmalen Bauweise nur unzureichend geführt werden und sich das Differenzial dadurch zu sehr wegdrücken könnte, wird das 56Z-Zahnrad des Differenzialgehäuses von zwei schmalen 19Z-Ritzel ohne Naben gestützt. Das Lenktrapez wird durch 2 schräg angeordnete Flachstücke gebildet, die mittels Spurstange verbunden sind.
Etwas einfacher ist der Aufbau der Hinterachse. Aufgrund der fehlenden Lenkung werden die Wellen über eine längere Distanz geführt und dadurch erübrigt sich eine "Abstützung" des Differenzials. Da sich die Achsschenkel bei Belastung auseinanderbiegen könnten, wurden sie mit einer zusätzlichen Querverbindung stabilisiert.
Zum Antrieb des Modells wurde ein Motor der Klasse Mabuchi 380 vorgesehen - eine Größe, die z. B. auch im Tronico-Traktor verbaut ist. Im häuslichen Magazin fand sich noch ein Mabuchi FS-390-PH, der für diese Anwendung geeignet erschien. Laut Datenblatt hat dieser Motor bei 12 V Versorgungsspannung eine Leerlaufdrehzahl von 13000 U/min und unter Belastung bei maximalem Wirkungsgrad (68%) noch 11330 U/min. Als abgegebene Leistung wird in diesem Arbeitspunkt ein Wert von knapp 22 W genannt. Bei einer Spannung von 8,4 V (7-zelliger Akku) liegen die Drehzahlen schätzungsweise zwar bei nur etwa 70%, betragen dann aber immer noch ca. 9000 U/min im Leerlauf bzw. ca. 8000 U/min unter Last. Ein zweckmäßiger Einsatz erfordert demnach eine entsprechend hohe Untersetzung. Die abgegebene Leistung dürfte sich bei 8,4 V Versorgungsspannung auf etwa 11 W halbieren, was für ein solches Modell trotz der Vielzahl an Zahnrädern und der damit verbundenen Verluste aber immer noch ausreichend sein sollte. Damit der Antrieb möglichst wenig in das Fahrerhaus hineinragt, wurde ein kompakter Antriebsblock konstruiert, der neben dem Motor aktuell eine Untersetzung von etwa 7,9:1 sowie einen 90°-Winkeltrieb und ein 19Z-Ritzel zur Auskopplung der Antriebskraft enthält. Zur Vermeidung von Messingspänen werden für die schnell drehenden Zahnräder auch hier wieder METALLUS-Delrin-Zahnräder verwendet. Der Antriebsblock kann einfach auf den Rahmen geschraubt werden und hierbei entsteht die kraftschlüssige Verbindung zum 25Z-Ritzel auf der Antriebswelle.
Vom Motor bis zu den Rädern ergibt sich aktuell eine Gesamt-Untersetzung von etwa 69:1. Sollte sich diese Untersetzung in der Praxis als zu hoch erweisen, dann kann sie durch Änderung der Primär-Untersetzung einfach reduziert werden. Beim Anlöten der Litzen wurde festgestellt, dass eine der beiden Lötfahnen mit einem roten Punkt gekennzeichnet ist. Hier wäre demnach der Pluspol anzuschließen und mit dieser Polarität dreht die Welle links herum. Das deutet darauf hin, dass der Motor offenbar für Linkslauf optimiert ist - die Achsdifferenziale wurden deshalb nachträglich nochmal umgedreht, damit das Modell bei Linkslauf des Motor vorwärts fährt. Wie bereits oben erwähnt, konnte noch eine einfache Kippmechanik für die Ladefläche untergebracht werden. Hierzu wurden verschiedene Varianten ausprobiert, aufgrund der engen Platzverhältnisse hat sich als bester Kompromiss letztendlich eine Konstruktion erwiesen, wie sie in ähnlicher Form seinerzeit auch im MAN F90 - Sandkastenkipper nachgerüstet wurde. Sie besteht aus einer kompakten Hebelmechanik mit 7-fach-Flaschenzug, einer 4mm-Welle als Seiltrommel sowie einer 75:1-Untersetzung aus Zahnrad- und Schneckentrieb. Im häuslichen Fundus fand sich zudem ein Miniatur-Motor, der aufgrund der hohen Untersetzung kraftvoll genug ist, um die Ladefläche in angemessener Zeit anzuheben. Hierbei rollt die Ladefläche auf den mit O-Ringen "bereiften" Schnurlaufrollen des Kipphebels ab - eine feste Verbindung zwischen Ladefläche und Kipphebel gibt es nicht. Der Antrieb der Kippmechanik befindet sich dort, wo ursprünglich das Lenkservo platziert werden sollte. Verdeckt wird er später vom Werkzeugkasten des Tronico-Unimogs, welcher ohne Änderung an das Fahrgestell geschraubt werden kann. Die in den folgenden Bildern erkennbaren Miniatur-Gummidämpfer dienen als Auflage für das Fahrerhaus und die Ladefläche, damit es beim Fahren nicht klappert.
Die Federung ist ebenfalls sehr einfach gehalten. Sie besteht für jedes Rad aus jeweils einer Druckfeder aus dem häuslichen Magazin, welche in einer beweglich montierten Schaftschraube geführt wird. Sollten sich die Federn am fertigen Modell als ungeeignet erweisen, dann können sie ohne Verwendung von Werkzeug leicht ausgetauscht oder Scheiben zur Nivellierung untergelegt werden.
Der mechanische Aufbau des Fahrgestells war somit abgeschlossen. Insgesamt wurden 51 Zahnräder sowie eine Schnecke verbaut und die Masse des Fahrgestells beträgt ca. 2,3kg.
Zur Komplettierung des Fahrgestells fehlte jetzt noch die Fernsteuerung. Die Auswahl geeigneter Komponenten ist insofern lästig und langwierig, dass sie meist nur kurzzeitig auf dem Markt verfügbar sind und bei jedem Modell wieder erneut gesucht werden muss. Beschafft wurden die Teile diesmal bei Modellbau-Profi. Ein 6-Kanal-Empfänger war noch vorrätig und dieser konnte an der linken Seite (in Fahrtrichtung) des Antriebsblocks untergebracht werden. Da ein relativ kleiner Antriebsmotor verwendet wird, ist ein Fahrtregler geringer Leistung ausreichend. Die Wahl fiel auf einen Regler von HOBBYWING, der für einen Dauerstrom von 25A und einen Spitzenstrom von 100A ausgelegt ist. Aufgrund seiner beeindruckend kleinen Bauform passt er auf die rechte Seite (in Fahrtrichtung) des Antriebsblocks. Im Gegensatz zu allen bisher eingesetzten Fahrtreglern liefert der HOBBYWING zur Versorgung des Empfängers und des Lenkservos eine BEC-Ausgangsspannung von 6V anstatt 5V. Der Empfänger hat damit kein Problem, wohl aber das Lenkservo. Worum es dabei genau geht und wie man Abhilfe schafft, wird weiter unten im Zusammenhang mit dem Servo beschrieben. Antriebsmotor und Fernsteuerung sind bei diesem Modell sehr kompakt zusammengefasst und im Sinne einer zuverlässigen Funktion sollte ein Kollektor-Motor wirksam entstört werden. Hinweise dazu findet man z. B. unter Entstörung von Kollektor-Motoren.
Der Antrieb für die Kippmechanik besteht aus einem Motor sehr geringer Leistung und hierfür wurde ein Regler von PICHLER mit besonders flacher Bauweise eingesetzt. Er hat seinen Platz in einer kleinen Box hinter der Kippmechanik, eingewickelt in grünem Isolierband. Das größte Problem bereitete das Lenkservo. Da der Platz für ein Standard-Servo bereits belegt war, musste ein Mini-Servo mit möglichst hoher Stellkraft gefunden werden. Gewählt wurde das Servo AS-340BB MG mit einem Stellmoment von 40Ncm bei 4,8V, welches auf der linken Seite hinter dem angedeuteten Tank befestigt werden konnte. Um das Servo in den vorgesehenen Gummidämpfern lagern zu können, wurde eine spezielle Halterung angefertigt. Wie bereits oben erwähnt, hat dieses Servo offenbar ein Problem mit 6V Versorgungsspannung. Beim Einschalten des Modells fährt das Servohorn kurzzeitig weit über die reguläre Endposition hinaus und zerrt dabei mit voller Kraft an Lenkgestänge und Servohalterung - ein Schaden am Modell ist dabei nicht auszuschließen. Abhilfe schafft die Verringerung der Spannung von 6V auf 5V; bei dieser Spannung verhält sich das Servo ganz normal und zuckt beim Einschalten lediglich etwas. Da die BEC-Spannung nicht ohne einen Eingriff in den Fahrtregler verringert werden kann, wurde in die Plus-Leitung zum Servo eine 1A-Diode in Durchlassrichtung geschaltet. Durch den Spannungsabfall an der Diode (ca. 0,65V) verringert sich die Spannung auf ca. 5,35V, was für eine ordentliche Funktion ausreicht. Warum die BEC-Spannung überhaupt von 5V auf 6V erhöht wurde, konnte mir bisher niemand plausibel erklären ... Auch die Lenkgeometrie musste nochmal korrigiert werden. Aufgrund der gegebenen Spurweite und des relativ kurzen Radstandes von ca. 19 cm müsste das Lenktrapez entsprechend ausgeprägt sein. Das hat zur Folge, dass das innere gelenkte Rad bei starken Lenkeinschlägen seine Führung verliert und auch schlecht wieder in die Geradeausposition zu bringen ist. Deshalb wurde das Lenktrapez nachträglich nochmal reduziert. Die Verbindung zur Spurstange besteht aus einem 1mm-Stahldraht, welcher zur Einstellung der exakten Länge mäanderförmig gebogen ist.
Dieses Modell wurde veröffentlicht in der englischen Zeitschrift CONSTRUCTOR QUARTERLY No. 142 December 2023 Abschließend an dieser Stelle noch ein Video des motorisierten Tronico-Unimogs (3:14min / 55MB) oder auch auf meinem YouTube-Kanal mit weiteren Videos. |