Metallbaukasten

|
Metallbaukasten |
|
Home |
|||||||||||||||||||||||||||||||||||||||||||||||||
Vorwort
Der Antrieb von TATRA-LKW Im Gegensatz zu herkömmlichen LKW hat ein TATRA weder einen Leiterrahmen noch Starrachsen, sondern einen sog. Zentralrohrrahmen und Halbachsen, welche um die Längsachse des zentralen Rohres pendeln können. Das zentrale Rohr mit einem Durchmesser von etwa 70cm enthält eine zentrale Hauptantriebswelle sowie sämtliche Differenziale und Winkeltriebe zur Auskopplung der Antriebskraft auf die Halbachsen. Durch dieses Konzept ergibt sich praktisch eine Einzelradaufhängung, welche dem LKW eine außergewöhnliche Geländegängigkeit verleiht. Nachteilig an dieser Konstruktion sind u. a. der relativ hohe mechanische Aufwand sowie der vom Einfederungszustand abhängige Reifenabrieb, der insbesondere an den Vorderrädern unbeladener Fahrzeuge aufgrund deren oftmals stark positiven Sturzes zu beobachten ist. Relativ kompliziert kann auch die Reparatur eines solchen Antriebs sein, da u. U. größere Bereiche des Fahrzeugs zu zerlegen sind. Weitere Informationen zum Aufbau von TATRA-LKW findet man im Internet, z. B. auch eine Animation zur Funktion und Montage eines TATRA PHOENIX. Wie auf der Animation zu erkennen ist, befinden sich bei einem TATRA Phoenix die Differenziale in Form von Stirnrad-Differenzialen neben den aus Tellerrädern bestehen Winkeltrieben und das ist auch bei einem TATRA 148 der Fall. Den prinzipiellen Aufbau eines solchen Antriebs zeigt die folgende Abbildung.
Da die erforderlichen Hohlwellen nicht Bestandteile üblicher Metallbaukastensysteme sind, wird der Nachbau eines solchen Antriebs mit den Teilen eines Metallbaukastens zwangsläufig nur eine Annäherung sein können. Bei der Suche nach Alternativen stößt man auf weitere Fahrzeuge mit Zentralrohrrahmen - z. B. auf das österreichische Militärfahrzeug Pinzgauer von Steyr-Puch, welches als extrem geländegängig gilt.
Der Antrieb des Sandkastenkippers Mein Ziel war die "straßentaugliche" Motorisierung eines Sandkastenkippers mit möglichst geringem Aufwand und dem erkennbaren Verhalten eines TATRA 148. Da sich ein TATRA-Antrieb mit den Teilen eines Metallbaukastens gemäß obiger Überlegungen nur mit deutlichen Abstrichen nachbilden lässt und dadurch unnötig kompliziert und schwer wird, wurde weiter nach praktikablen Lösungen gesucht. Hierbei habe ich schließlich einen zufriedenstellenden Kompromiss zwischen Originalität, Machbarkeit und Tauglichkeit gefunden. Grundlage dieses Antriebs ist ein speziell aufgebautes Differenzial aus Kronrädern, Ritzeln und Stirnzahnrädern, welches ich im Internet gefunden hatte, in Kombination mit einer Schwinge, wie sie sich bereits in anderen meiner Modelle bewährt hatte. Wer dieses spezielle Differenzial erfunden hat oder ob es einst in einem MECCANO-Anleitungsheft veröffentlicht war, ist mir nicht bekannt.
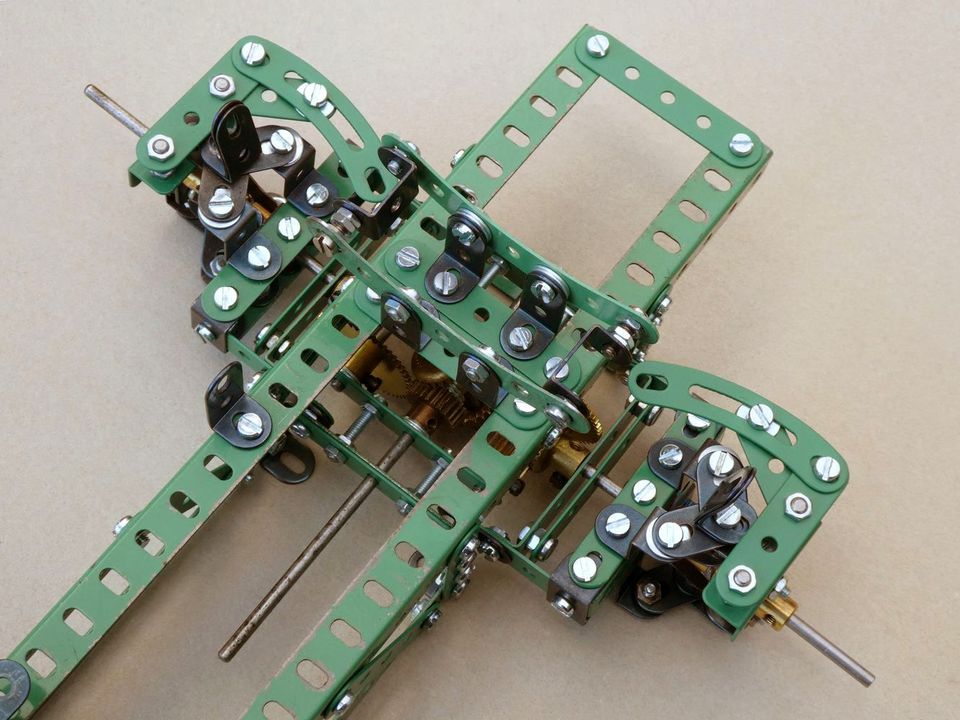
Auf der Zwischenwelle befindet sich des Weiteren ein 19Z-Ritzel, welches mit einem 25Z-Kronrad einen 90°-Winkeltrieb bildet und die Kraft auf die Antriebswelle in der trapezförmigen Schwinge koppelt. Die Drehachse der Schwinge liegt in der Drehachse der Zwischenwelle, sodass der Abstand zwischen 19Z-Ritzel und 25Z-Kronrad beim Pendeln der Schwinge stets gleich bleibt. Die Gesamt-Untersetzung dieser Konstruktion beträgt etwa 2,63. Vorteilhaft ist bei diesem Prinzip, dass die zentrale Hauptantriebswelle - wie beim Original - von vorn bis hinten durch den "Zentralrohrrahmen" verlaufen kann und allenfalls durch ein Differenzial zwischen Vorder- und Hinterachsen unterbrochen wird. Der gesamte Aufbau wird dadurch relativ einfach, ohne das typische Verhalten eines TATRA 148 zu verändern. Die Konstruktion des Fahrgestells Die Nachbildung eines runden Zentralrohrrahmens mit den Teilen eines Metallbaukastens dürfte bei diesem Maßstab sehr schwierig bis unmöglich sein. Den "Zentralrohrrahmen" bildet deshalb ein Rechteckprofil der Abmessungen 5 Loch x 4 Loch und ist mit ca. 635mm Länge (50 Loch) der Größe des zu motorisierenden Modells angepasst. Ausschlaggebend für eine zufriedenstellende Funktion ist die exakte Ausrichtung der Lagerungen aller Wellen und Schwingen sowie ein kraftvolles Festziehen aller Schraubverbindungen. Idealerweise sollte eine lange Welle möglichst leicht von vorn bis hinten durch alle Lagerungen der angetriebenen zentralen Welle geschoben werden können (dargestellt im Bild unten links) - diese Justierung ist umständlich und zeitraubend, aber machbar. Verbleibende geringe Versätze zwischen den einzelnen Wellenstücken können mit spielbehafteten Kupplungen oder Gelenken ausgeglichen werden, was gleichermaßen auch die Montage erleichtert. Da ein Rechteckprofil im Gegensatz zu einem Rundrohr weitaus weniger verwindungssteif ist, sollte der Rahmen durch Querverstrebungen stabilisiert werden. Einige dieser Verstrebungen können erst nach der Montage der Antriebskomponenten angebracht werden und sind auf den untenstehenden Bildern noch nicht zu sehen. Die später noch unter dem Rahmen anzubringenden Lochbänder dienen zusätzlich dem Schutz der Zahnräder, falls das Modell auf den Boden aufsetzen sollte. Auf der oberen Seite des Rahmens (Bild unten rechts) ist bereits das Gegenlager für die Federung der Vorderräder mittels Druckfedern montiert.
Im nächsten Schritt wurden gemäß des oben dargestellten Antriebsprinzips alle Ritzel, Zahn- und Kronräder montiert. Diese sind ebenfalls sorgfältig zueinander auszurichten und hierfür wurden zahlreiche Unterlegscheiben verwendet. Die Längen der Wellen entsprechen noch nicht dem endgültigen Zustand. Insbesondere wurde zwischen der Vorderachse und den beiden Hinterachsen Platz gelassen für das Zwischendifferenzial, welches einfacherweise als Stirnrad-Differenzial ausgeführt werden sollte. Zwischen den beiden Hinterachsen gibt es kein Differenzial, weil es beim Original-Fahrzeug auch nicht vorhanden ist. Abgesehen davon würde ein solches Differenzial den mechanischen Aufbau deutlich verkomplizieren. Stattdessen wurden die zentralen Antriebswellen beider Hinterachsen mit einer Klauenkupplung verbunden, welche eine klemmfreie Funktion ermöglicht.
Deutlich komplizierter sind die Schwingen für die Vorderräder, da sie die Teile für die Lenkung sowie den Antrieb der Vorderräder enthalten. Die Konstruktion entpricht weitgehend dem Aufbau der angetriebenen Vorderräder beim vor Jahren gebauten Fahrgestell mit Allrad-Antrieb für einen MAN F90 - Sandkastenkipper, allerdings wurde das aus bearbeiteten Metallbaukastenteilen gefertigte Kreuzgelenk verbessert.
Als nächstes erfolgte die Montage der Schwingen. Sie sind in kurzen Schrauben gelagert und lassen sich dadurch leicht ein- und ausbauen, ohne andere Teile entfernen zu müssen.
Die an den Vorderrad-Schwingen erkennbaren Bogenbänder dienen als Lenkhebel, mit denen jedes Rad einzeln vom Lenkgestänge betrieben wird. Durch die Anordnung der Lenkhebel liegt der Anlenkpunkt vor dem Drehpunkt der Achsschenkel und dadurch wird - wie beim Original - das Lenktrapez gebildet (siehe auch Lenkung von Fahrzeugen unter "Sonstige Projekte").
Nach Montage der Räder erkennt man bereits das typische Verhalten eines TATRA 148. Da die Federpakete weniger der Federung dienen, sondern hauptsächlich als ausgleichende Wippe wirken, stehen die Hinterräder auf ebenem Boden praktisch unabhängig von der Beladung nahezu senkrecht. In unebenem Gelände passen sich die Hinterräder entsprechend an und pendeln hierbei entgegensetzt um die Lagerung der Federpakete. Bei den Vorderrädern stellt sich am unbeladenen Modell - wie auch beim Original - der für dieses Fahrzeug charakteristische positive Sturz ein.
Zur Federung der Vorderräder wird beim Original ein Torsionsstab in Verbindung mit einem Stoßdämpfer eingesetzt. Mit einem selbst gebastelten Torsionsstab und auch mit einer "abgewandelten" Torsionsstabfederung hatte ich zwar experimentiert, das Ergebnis war allerdings nicht überzeugend. Abgesehen davon, dass ein passender Drehstab schwer zu finden sein dürfte, muss er sehr steif mit dem Rahmen verbunden werden und das war im vorliegenden Fall nicht zufriedenstellend gegeben. Außerdem hielten sich die Einstellmöglichkeiten in engen Grenzen.
Da die letzte Baureihe des TATRA 148 ein Differenzial zwischen der Vorder- und den Hinterachsen hat, sollte auch das Modell mit einem solchen Zwischendifferenzial ausgestattet werden. Als Bauform eignete sich ein Stirnrad-Differenzial, weil es einfach in den Verlauf der Hauptantriebswelle einzufügen war. Da außerdem die Antriebskraft von oben zugeführt wird, bot sich gleichermaßen der Einbau eines 2-Gang-Getriebes aus 19Z- und 25Z-Ritzeln an. Entstanden ist eine kompakte eigenständige Einheit, die sich mit wenig Aufwand von unten in den "Zentralrohrrahmen" einbauen und bei Bedarf wieder ausbauen lässt.
Zum Antrieb des Modells wurde wieder ein handelsüblicher Low-Cost-Kollektormotor vorgesehen, wie er auch in allen meiner anderen Modelle seit Jahren seinen Zweck erfüllt. Die aktuelle Ausführung (MOTRAXX XDRIVE 540-1) hat bei gleicher Versorgungsspannung jedoch etwas mehr Leistung und eine höhere Drehzahl, die eine noch stärkere Untersetzung erfordert. Die ersten beiden Untersetzungen bestehen aus Delrin-Zahnrädern, weil sie ruhiger laufen und angesichts der hohen Drehzahlen keine Messingspäne produzieren. Da sich unter der Motorhaube des TATRA 148 viel Platz findet, konnte gleichermaßen ein weiteres einfaches 2-Gang-Getriebe in Form eines 3:1-Vorgeleges untergebracht werden. Entstanden ist eine weitere kompakte Einheit, die von oben auf den "Zentralrohrrahmen" gesetzt wird und sich einfach mit dem Getriebe des Zwischendifferenzials koppeln lässt. Insgesamt ergeben sich somit 4 Gänge, die jeweils um einen Faktor von etwa 1,73 auseinander liegen, und die Gesamt-Untersetzung ist so berechnet, dass das Modell eine Geschwindigkeit zwischen ca. 1km/h bis ca. 5km/h erreicht.
Zur Komplettierung des Fahrgestells fehlten jetzt nur noch die Komponenten der Fernsteuerung. Als Schaltservos für die beiden Getriebe reichen Mini-Servos. Diese wurden federnd mit den Schaltwellen verbunden, um - wie bereits bei anderen Modellen beschrieben - die Bewegung des Servohorns aufnehmen zu können, falls die Zahnräder des Getriebes voreinander stehen.
Abschließend war der vorgesehene LKW-Aufbau entsprechend anzupassen und hierfür wurde ein weiterer Sandkastenkipper beschafft. Neben den Rädern waren auch Teile des Kunststoffkörpers zu entfernen, insgesamt konnte der Originalzustand aber weitestgehend erhalten bleiben. In diesem Rahmen wurde auch das Fahrgestell noch mit diversen Stützen und Befestigungen nachgerüstet, um den LKW-Aufbau ohne Werkzeug möglichst einfach aufsetzen und für Demonstrationszwecke abnehmen zu können.
Dieses Modell wurde veröffentlicht in der englischen Zeitschrift CONSTRUCTOR QUARTERLY No. 136 June 2022 in der deutschen Zeitschrift TRUCK MODELL 02 Februar / März 2023 in der niederländischen Zeitschrift De ModelBouwer NUMMER 3 · 2023. Abschließend an dieser Stelle noch ein Video des motorisierten TATRA 148 - Sandkastenkippers (4:18min / 74MB) oder auch auf meinem YouTube-Kanal mit weiteren Videos. |