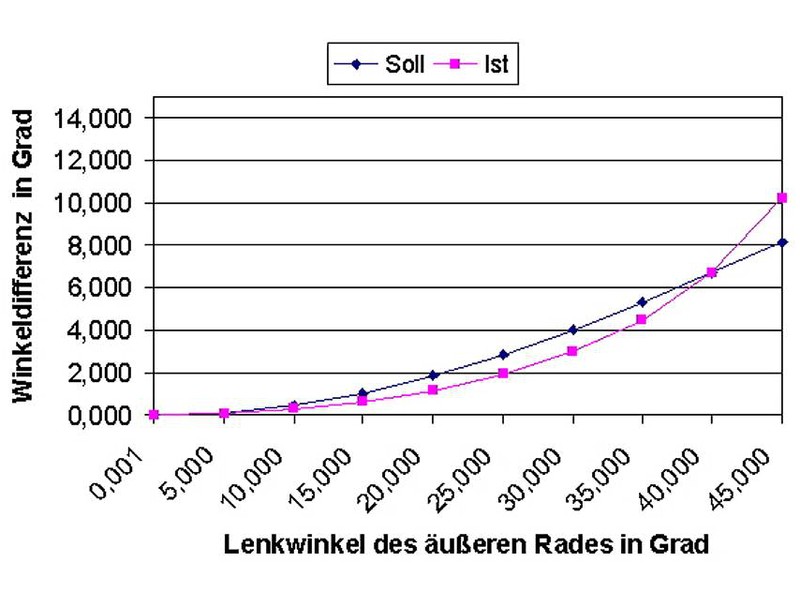
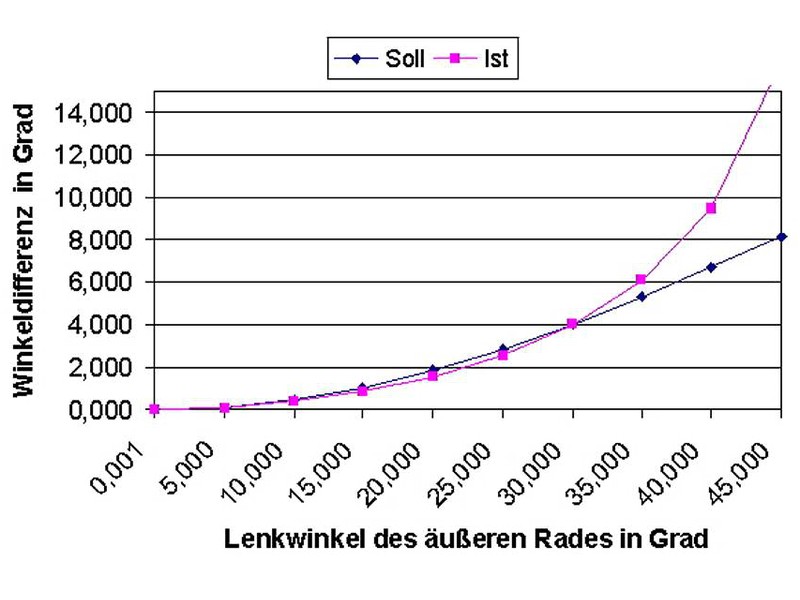
wobei der Unterschied der Lenkwinkel beider Räder auch als Winkeldifferenz oder als Voreilwinkel bezeichnet wird.
Zur Vollständigkeit sei erwähnt, dass es für die Berechnung unerheblich ist, ob sich das gelenkte Rad im oder auf einem Achsschenkel außerhalb des Drehpunkts befindet.

Lenkwinkel gelenkter Räder