| |
Schon lange bestand der Wunsch, einmal ein ferngesteuertes Fahrzeug mit Allrad-Antrieb
zu bauen.
Problematisch ist hierbei naturgemäß die Kraftübertragung auf die
gelenkten Räder, welche gerade bei einem ferngesteuerten Modell einigermaßen
zuverlässig funktionieren sollte. Der Metallbaukasten bietet zwar Kardangelenke,
diese sind jedoch relativ lang und erlauben zum Teil auch nur geringe Lenkwinkel.
Ein Fahrzeug mit Allrad-Antrieb muss deshalb eine bestimmte Größe haben,
woraus wiederum ein hohes Gewicht resultiert, welches den Antrieb entsprechend belastet.
Aus den Kindertagen unserer Tochter existierte noch ein Sandkasten-MAN etwa im
Maßstab ca. 1:9, der zudem noch sehr gut erhalten war.
Die Untersuchung der Räder zeigte, dass deren Durchmesser genau dem Durchmesser
der LKW-Reifen von METALLUS entsprach. Da der LKW aus Kunststoff bestand, war
außerdem das Gewicht relativ gering.
Es lag daher nahe, für den Sandkasten-MAN ein passendes Fahrgestell aus dem
Metallbaukasten zu bauen und dabei gleichzeitig einen Allrad-Antrieb zu konstruieren.
|

Der Original-Sandkasten-MAN
|
Da es sich um ein Baufahrzeug handelt, schien eine gewisse Beweglichkeit der Achsen
angebracht. Die Vorderachse sollte deshalb als Pendelachse ausgeführt werden
während für die Hinterachsen eine Federung vorgesehen war.
Zur Demonstration der mechanischen Funktion war geplant, den kompletten LKW-Aufbau
ohne Werkzeug mit nur wenigen Handgriffen vom Fahrgestell lösen zu können.
Die LKW-Karosserie durfte also nicht Bestandteil des Fahrgestells werden.
Letztendlich sollte das Fahrgestell nach Möglichkeit ausschließlich aus
METALLUS-Teilen bestehen, und hiervon wurde nur in wenigen Details abgewichen. Einige
Gewindestangen sind z. B. abzulängen und einige Flachstücke sind mit einer
Feile zu bearbeiten.
Um alle diese Forderungen zu erfüllen, wurde zunächst ein einfacher Rahmen
konstruiert. Er besteht im Wesentlichen aus 2 U-Trägern mit 48 Loch Länge
(35 Loch + 13 Loch) und einigen Querverbindungen sowie den erforderlichen Befestigungen
und Aufnahmen für die Komponenten.
Die Schwierigkeit war hierbei die Anpassung an die vorgegebene Karosserie, um diese
möglichst wenig verändern bzw. durchdringen zu müssen.

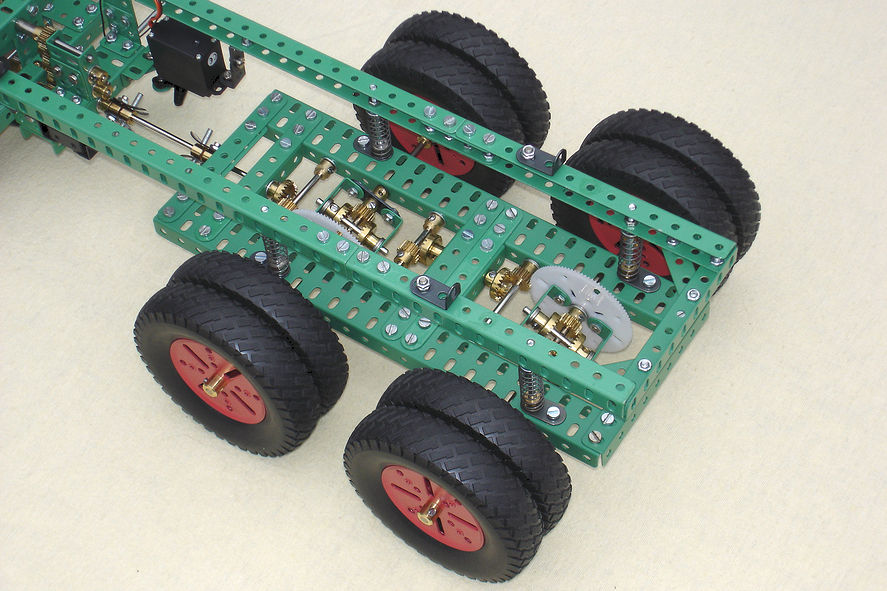
Der komplette Rahmen von oben ...
|
|

... und der vordere Bereich von unten betrachtet
|
Das Herzstück des Antriebs ist der IGARASHI-Motor SP3650-65 (CONRAD), der sich
bereits in den anderen ferngesteuerten Modellen bewährt hat. Er befindet sich -
wie auch die Aufnahmewanne für den Fernsteuer-Empfänger
und den Fahrtregler - über der Vorderachse.

Der Antrieb
|
Anhand der Motordaten und der weiteren Gegebenheiten wurde eine Getriebe-Untersetzung von
mindestens 20:1 errechnet, wobei die Differenziale eine Reduzierung von ca. 4:1
durchführen.
Das verbleibende Verhältnis von 5:1 wurde mittels eines Zahnradpaares 19Z / 95Z
eingestellt, welches die Kraft auf eine Zwischenwelle überträgt.
Da die Motorwelle einen Durchmesser von 3,17mm hat, wurde kein 19-Zähne-Ritzel
aus dem Metallbaukasten verwendet, sondern ein Ritzel aus dem technischen Modellbau im Modul
0,6. Dieses Modul ist zwar ca. 10% kleiner als das Modul 38dp, die Untersetzung funktioniert
damit aber zufriedenstellend.
|
Von der Zwischenwelle geht es über eine "Serienschaltung" mehrerer 19Z-Ritzel auf die
Haupt-Antriebswelle, und von dort wird die Kraft auf die Vorder- und Hinterachsen verteilt.
Die Vorderachse besteht im Wesentlichen aus einem Rahmen mit den Aufnahmen für die
Achsschenkel, in dem sich das Differenzial und die anderen Zahnräder zur Einkopplung
der Antriebskraft befinden.
Recht einfach ist die Kraftübertragung von der Haupt-Antriebswelle auf die Vorderachse,
welche - wie bereits erwähnt - als Pendelachse aufgebaut ist.
|

Die Vorderachse von oben betrachtet
|

Die Kraftübertragung auf die Vorderachse
|
Die Einkopplung der Kraft erfolgt über ein Zahnradpaar 19 Zähne, von dem sich
das eine Zahnrad am Rahmen in der Drehachse des Pendels befindet.
Das andere Zahnrad ist an der Vorderachse befestigt und kann sich auf einer Kreisbahn um
das erste herum bewegen. Der Abstand der Zahnräder bleibt dadurch beim Pendeln der
Vorderachse immer gleich groß.
|
Das größte Problem war zunächst die Kraftübertragung auf die gelenkten
Vorderräder, und nach einigen Versuchen wurden hierfür Gelenke aus Stangen mit
Kreuzköpfen und Gabeln eingesetzt, wie sie z. B. aus dem Minicar-Modellbau bekannt sind.
Ein Kreuzkopf besteht aus einem Stellring und 2 kurzen Gewindestangen, mit denen der
Kreuzkopf gleichzeitig an die Welle geklemmt wird.
Eine Gabel besteht aus einem Stellring und 2 Flachstücken, bei denen das Langloch zu
einer Gabel aufgefeilt wurde. Der Stellring wird ebenfall mit 2 kurzen Gewindestangen an die
Welle geklemmt und anschließend die aufgefeilten Flachstücke mit jeweils einer
Mutter angeschraubt. Zur Erhöhung der Bewegungsfreiheit zwischen Gabel und Kreuzkopf
wurden die Flachstücke am Ende noch etwas aufgebogen.
Im vorliegenden Fall wurden bei den Gabeln keine kurzen Gewindestangen verwendet, sondern
M4-Schrauben mit einem besonders schmalen Kopf, die sich zufällig im häuslichen
Magazin fanden; Madenschrauben mit passender Länge wären hierfür vermutlich
ebenfalls brauchbar.
|

Die Kraftübertragung auf die Vorderräder
|
Damit sich die Vorderräder beim Lenken auf einem möglichst kleinen Kreisbogen
bewegen, wurden die Gelenke auf minimale Baugröße bei maximalem Lenkwinkel
optimiert; dieser beträgt etwa 40°.
Von elementarer Bedeutung für die Funktion der Kraftübertragung ist die exakte
Justage der Gelenke. Die Gewindestangen eines Kreuzkopfes müssen genau in der
(senkrechten) Lenkachse und der Kreuzkopf selbst in der Höhe der Gabeln liegen.
Andernfalls wird die Lenkung nicht ohne Klemmen und Hakeln funktionieren.

Das eingebaute Lenkservo
|
Die angetriebenen Wellen der Vorderräder sind in den Naben von je 2 Achshaltern
gelagert. Hierdurch ergibt sich eine ausreichend lange Führung der Wellen und die
erforderliche Stabilität der Vorderräder.
Das Lenktrapez wurde so eingestellt, dass sich die verlängert gedachten
Lenkhebel zwischen den Hinterachsen schneiden.
Das Lenkservo mit einem Stellmoment von 60Ncm fand im vorderen Bereich des Rahmens
ausreichend Platz.
|
Auch die Vorderachse wurde zur Bedämpfung der Pendelbewegung mit 2 Druckfedern
ausgestattet, da das Modell sonst unnatürlich instabil auf den Rädern steht.
Um den Aufwand für die gefederten Hinterachsen zu begrenzen, wurden beide Achsen als
komplette Antriebseinheit konstruiert, welche später beim Aufbau des Modells mit
lediglich 4 federnden Befestigungen einfach an den Rahmen geschraubt werden konnte.
Dies hat den Vorteil, dass die Antriebe der Achsen starr miteinander verbunden werden
können und zwischen den Achsen keine Kopplung mit Längenausgleich erforderlich ist.
Nachteilig ist, dass sich die Achsen nicht unabhängig voneinander bewegen können.
Da die Vorderachse jedoch auch angetrieben wird, ist das im praktischen Betrieb des
Modells aber vermutlich kein Problem.
|

Die Hinterachsen als komplette Antriebseinheit
|

Die Kraftübertragung auf die Antriebseinheit
|
Aufgrund der federnden Aufhängung der Antriebseinheit ist zwischen der
Haupt-Antriebswelle und der Antriebseinheit eine Kardanwelle mit 2 Gelenken und einem
Längenausgleich erforderlich.
Auch hierfür wurden Gelenke aus Stangen mit Kreuzköpfen und Gabeln verwendet, da
sie den erforderlichen Längenausgleich ohne weitere Maßnahmen erlauben.
|
Für den Akku wurde eine Halterung im vorderen Bereich des Rahmens angebracht;
hier stört er am wenigsten und ist leicht zugänglich.
Die Fernsteuer-Komponenten passen in die vorgesehene Wanne zu beiden Seiten des Motor.
Abschließend wurde noch die auf der Antriebseinheit lastende Gewichtskraft gemessen
und daraus die erforderlichen Druckfedern bestimmt. Die insgesamt 4 Federn sind alle gleich
groß und konnten aus einem Rohling (als Meterware erhältlich) hergestellt werden.
Der Federweg beträgt etwa +/- 10mm.

Das komplette ...
|
|

... Fahrgestell
|
Gemäß der Vorgaben ist das Fahrgestell vollkommen eigenständig und
kann zur Demonstration der Funktion für sich allein betrieben werden.
Mit wenigen Handgriffen und ohne Werkzeug kann aus dem LKW-Fahrgestell ein MAN-Baufahrzeug
mit Allrad-Antrieb im Maßstab 1:9 gemacht werden.
|

Der Allrad-MAN in Aktion
|
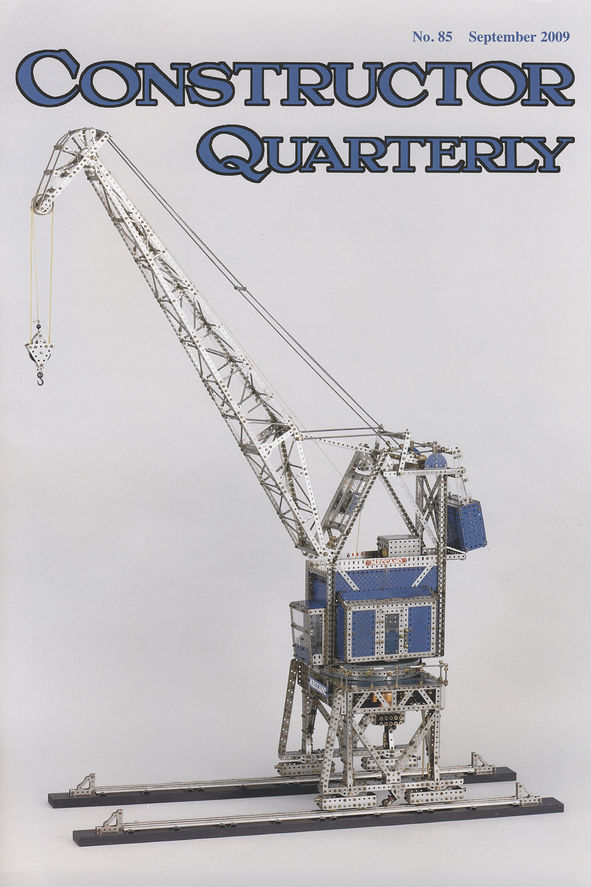
Titelseite der Constructor Quarterly No. 85
|
Die Ausgabe No. 85 (September 2009) der englischsprachigen Zeitschrift
Constructor Quarterly enthält einen umfassenden Beitrag über das
LKW-Fahrgestell mit Allrad-Antrieb.
Die Abbildung der Titelseite dieses Heftes erfolgt mit freundlicher Genehmigung des
Herausgebers der Zeitschrift Constructor Quarterly.
|
Da sich das fehlende Differenzial zwischen der Vorder- und den Hinterachsen auf Dauer als
recht unbefriedigend herausstellte, wurde das Fahrgestell im September 2009 leicht
umgebaut.
Ein Differenzial aus METALLUS-Teilen war zwar machbar, aufgrund seiner Größe
wäre allerdings eine signifikante Änderung des vorgegebenen LKW-Aufbaus erforderlich
gewesen. Andererseits sollte bei diesem Modell kein Differenzial aus systemfremden Teilen
verwendet werden.
Die Entscheidung fiel zu Gunsten der einfachsten Lösung, nämlich eines zuschaltbaren
Antriebs für die Vorderachse. Hierzu mussten zunächst die Aufhängung der
Pendelachse geändert sowie einige Teile des bisherigen Antriebs getauscht werden.
Die Zuschaltung des Antriebs erfolgt durch Verschieben einer Welle, und hierfür reicht
z. B. das Mini-Servo ES-05 von Conrad. Es passt genau in eine Ecke der Vorderachse und folgt
somit den Bewegungen beim Pendeln; eine komplizierte mechanische Kopplung ist dadurch nicht
erforderlich.
|

Die Vorderachse mit zuschaltbarem Antrieb
(hier mit eingeschaltetem Vorderradantrieb)
|
Abschließend noch ein
Video des LKW-Fahrgestells mit Allrad-Antrieb (1:54min / 38MB).
Daten des LKW-Fahrgestells mit Allrad-Antrieb:
| Länge: | 65cm |
| Breite: | 27cm |
| Höhe: | 15cm |
| Gewicht: | 4,5kg, mit LKW-Aufbau 6,5kg |
| Anzahl der Bauteile: | noch nicht ermittelt |
Home
|