| |
Im Jahr 2024 konnte ich weitere 4 Märklin-Spulen erwerben mit dem Ziel, irgendwann einen
Hubkolben-Motor nachzubilden und es stellte sich die Frage, welcher es denn sein sollte?
Die gängigen Motor-Konstruktionen wurden schon oft genug gebaut und waren mir zu unspektakulär.
Außerdem hatte ich im Laufe der Jahre bereits unterschiedliche Motormodelle mit Spulen gebaut
(Dampfmaschine mit Fliehkraftregler,
Schwinganker-Motor,
2-Zylinder-Dampfmaschine,
Synchrotronik-Motor)
und wollte nach Möglichkeit etwas Neues ausprobieren.
Lange war ich deshalb unschlüssig, welche Art von Motor man mit den neu erworbenen Spulen bauen könnte.
Beim Durchsehen älterer
Maschinen im Modellbau -
Hefte war mir in der Ausgabe 5/2002
eine 4-Zylinder-Dampfmaschine mit einer ungewöhnlichen Anordnung der Zylinder aufgefallen
(Abbildung rechts).
Eine weitere Besonderheit dieser Maschine ist ihre Kolbensteuerung (nicht zu
verwechseln mit Kolbenschiebersteuerung). Hierbei strömt der Dampf in Abhängigkeit von der
Stellung des
Kolbens sowie der Pleuelstange über Öffnungen im Kolben und Kolbenbolzen in den oberen Zylinderraum.
Insgesamt wirkt die Maschine sehr kompakt und benötigt keine komplizierte Kurbelwelle.
Ein Nachbau mit Märklin-Spulen erschien mir relativ einfach und als Demonstrationsmodell kam es
auch nicht auf ein Designpreis-verdächtiges Erscheinungsbild an.
Allerdings hatte ich keine Idee, wie man einen solchen Motor nennen könnte.
|

Mit freundlicher Genehmigung der Zeitschrift
MASCHINEN IM MODELLBAU
des
www.vth.de
|
Quelle: Ungewöhnliche Motoren von
Stefan Zima (†) und Reinhold Ficht (†)
|
Der entscheidende Hinweis kam von einem Schrauber-Kollegen aus dem
Metallbaukasten-Forum.
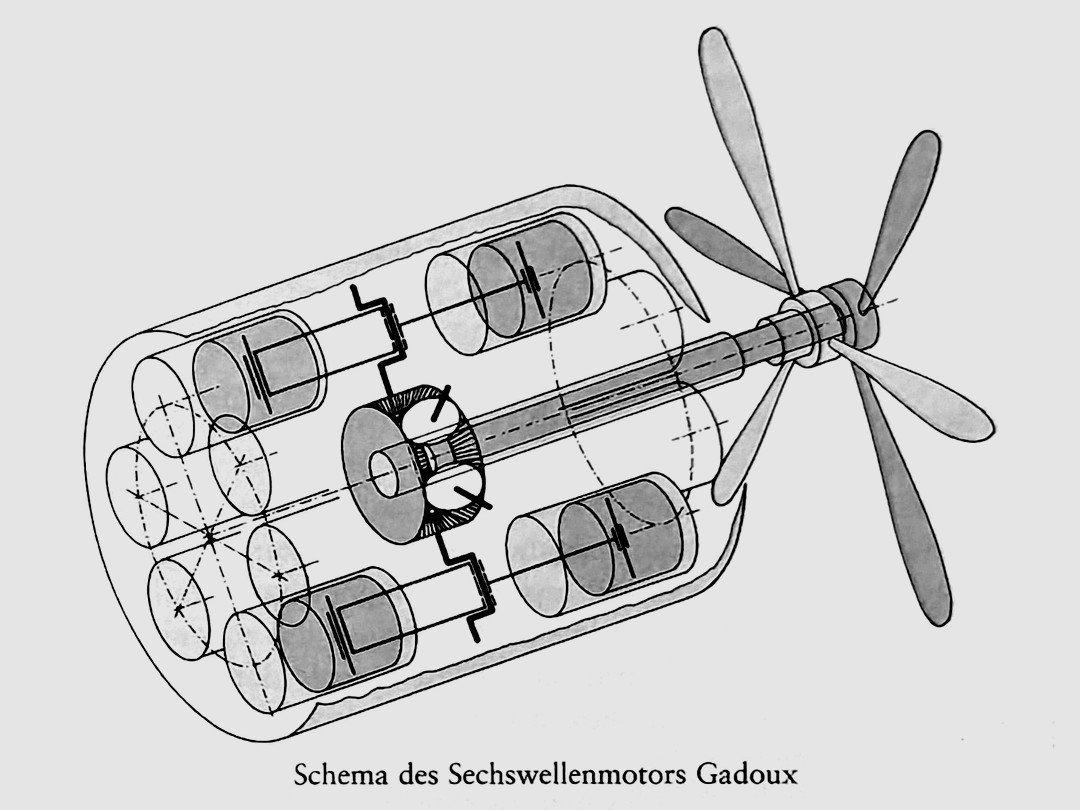
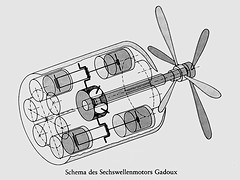
Er machte mich auf ein Buch mit dem Titel Ungewöhnliche Motoren aufmerksam und darin ist
u. a. ein ähnlich aufgebauter Hubkolbenmotor als mögliche Alternative zum Sternmotor für
den Antrieb von Flugzeugen beschrieben (Abbildung links).
Aufgrund der kreisförmigen Anordnung seiner 6 Zylinder um eine zentrale Abtriebswelle herum wird er
in diesem Buch als Ringmotor oder auch als Polygon-Motor bezeichnet.
|
Das Grundgerüst des 4-Zylinder-Polygon-Motors ist ein "Turm" mit quadratischem
Querschnitt der Größe 3 Loch x 3 Loch.
Als Fuß dient ein Großes Rad 11015 und als Deckel eine Runde Platte 10395.
Am oberen Ende des Turms sind die 4 Spulen höhenverstellbar befestigt, sodass der Hub der als Kolben
arbeitenden Eisenkerne exakt an die Exzenter angepasst werden kann.
Mittels 5 Loch langer Pleuelstangen und Exzenter aus Lochscheiben werden die unter den Spulen liegenden
Kurbelwellen angetrieben.
|

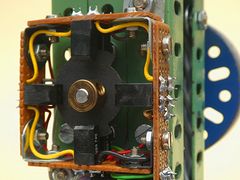
Der Polygon-Motor mit 4 Spulen
|

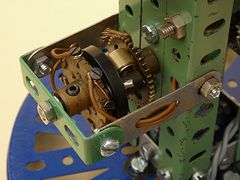
2 der 4 Winkeltriebe im Inneren des Turms
|
Am anderen Ende jeder Kurbelwelle befindet sich im Inneren des Turms ein 19Z-Ritzel, welches das 25Z-Kronrad
einer senkrecht stehenden Welle im Zentrum des Turms antreibt.
Am unteren Ende der zentralen Welle befindet sich ein Winkeltrieb 25Z auf 19Z, der die
Antriebskraft auf die Ausgangswelle überträgt und das Übersetzungsverhältnis 1:1 wieder herstellt.
Auf der Ausgangswelle befindet sich eine Runde Platte 10365 als Schwungrad und auf der gegenüberliegenden
Seite der Kommutator.
Dieser kann z. B. aus einem Lochscheibenrad oder einem Zahnrad mit angeschraubtem Drahtbügel sowie einem oder
mehreren Schleifkontakten bestehen.
|
Für die Schaltfolge der Spulen gibt es mehrere Möglichkeiten.
Theoretisch könnten alle 4 Spulen parallel arbeiten und dazu wäre nur ein einziger Schleifkontakt
erforderlich. Allerdings benötigen die Exzenter in diesem Fall große Ausgleichsgewichte für die
Kerne der senkrecht angebrachten Spulen sowie deren Pleuelstangen und der Schleifkontakt müsste einen Strom
von mehreren Ampere schalten können. Diese ungünstigste aller Varianten wurde deshalb gar nicht erst
ausprobiert.
Deutlich vorteilhafter ist es, wenn jeweils 2 Spulen parallel arbeiten und die anderen beiden um 180° versetzt.
Diese Variante benötigt 2 Schleifkontakte und da sich bei 180° Verschiebung der Exzenter die Massen
zumindest statisch nahezu kompensieren, sind keine Gegengewichte erforderlich.
Mit dieser Schaltfolge funktioniert die Maschine erstaunlich gut, wie in einem
Video des Prototypen
zu sehen ist. Selbstanlaufend ist sie aus den Totpunkten heraus jedoch ebenfalls nicht.
|
Mit diesem Kommutator wird jedes
Spulenpaar für ca. 135° eingeschaltet
|
Das beste Ergebnis liefert die einzelne Steuerung der Spulen mit 4 Kontakten.
Durch eine 90°-Verschiebung aller Exzenter zueinander sind auch bei dieser Einstellung keine Gegengewichte
erforderlich und bei ausreichender Überschneidung der Stromflusswinkel benachbarter Spulen ist die Maschine
selbstanlaufend.
Der Kommutator kann z. B. aus 4 der oben gezeigten Schleifkontakte bestehen sowie einem Drahtbügel, der pro
Spule einen Stromflusswinkel von ca. 120° zulässt.
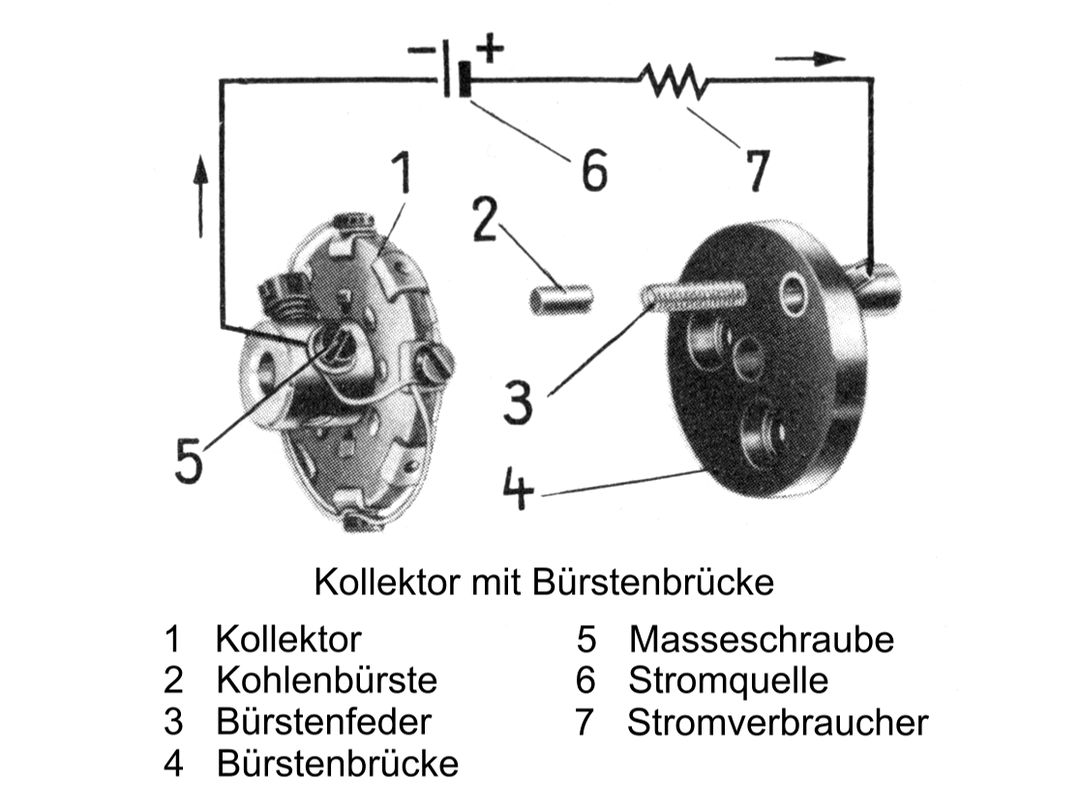
Der Märklin-Kommutator
|
Alternativ können die Spulen auch mit dem Märklin-Kommutator geschaltet werden, der zwischen Mitte
der 1950er und Mitte der 1970er Jahre erhältlich war.
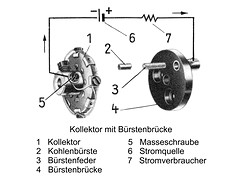
Er besteht aus einem 8-segmentigen Kollektor sowie einer Bürstenbrücke mit Kohlenbürste und Feder.
Durch eine entsprechende Verbindung von Segmenten können mit Hilfe der Spule unterschiedliche Hubkolben- sowie
Polrad-Motoren gebaut werden, wie sie in den alten Anleitungsheften beschrieben sind.
|
Wenn nur eine einzelne Spule geschaltet werden soll - und das ist bei den in den Anleitungsheften beschriebenen Motoren
der Fall - , dann kann sich der Kollektor drehen und den Stromkreis gegen Struktur (Masse) schließen während
die Bürstenbrücke fest montiert ist.
Wenn mehrere Spulen zu schalten sind, dann funktioniert das nicht mehr ohne Weiteres.
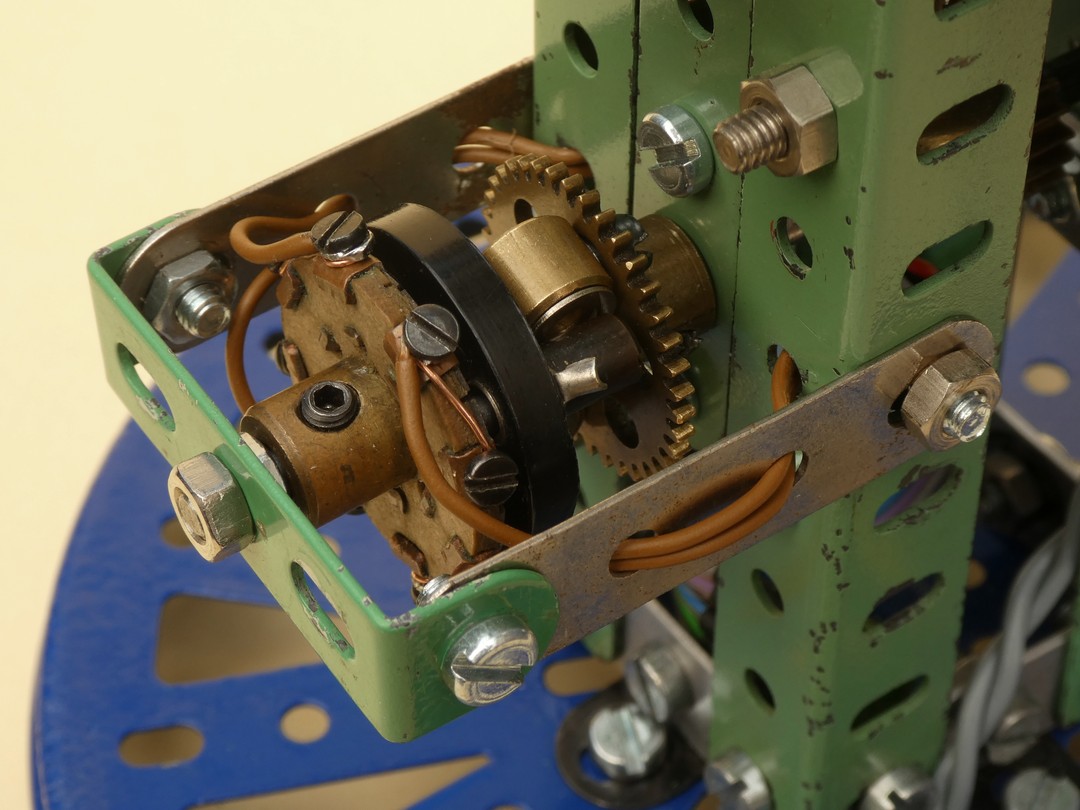
In diesem Fall ist der Kollektor fest montiert und die Bürstenbrücke muss sich drehen, was z. B. mit Hilfe eines
38Z-Zahnrads und einem Stellring als Verbindungselement aber problemlos möglich ist.
Die zwischen Stellring
und Aufnahmezylinder der Kohlenbürste erkennbare eingeklemmte Unterlegscheibe stellt hierbei den Kontakt zur
Struktur (Masse) her.
|
Märklin-Kommutator mit
sich drehender Bürstenbrücke
|
Zur Steuerung der 4 Spulen sind jeweils 2 benachbarte Kollektor-Segmente zu verbinden und hieraus ergibt sich für jede
Spule ein Stromflusswinkel von 90°. Durch Verdrehen des Kollektors kann - ähnlich der Zündeinstellung eines
Verbrennungsmotors - die Position des Stromflusswinkels auf maximale Drehzahl optimiert werden.
Aufgrund der fehlenden Überschneidung der Stromflusswinkel könnte es
theoretisch Positionen geben, aus denen der Motor nicht selbsttätig anläuft.
Da der Durchmesser der Kohlenbürste aber etwa 3 mm beträgt und der Abstand zwischen den Kollektor-Segmenten sehr
klein ist, werden im Übergangsbereich kurzzeitig 2 Spulen bestromt und das reicht aus, um den Motor aus jeder
Position heraus anlaufen zu lassen.
Die Nachteile einer jeden mechanischen Kommutierung sind Reibung und Verschleiß. Um insbesondere den
Märklin-Kommutator nicht weiter abzunutzen, wurde der Motor letztendlich mit einer einfachen reibungs- und
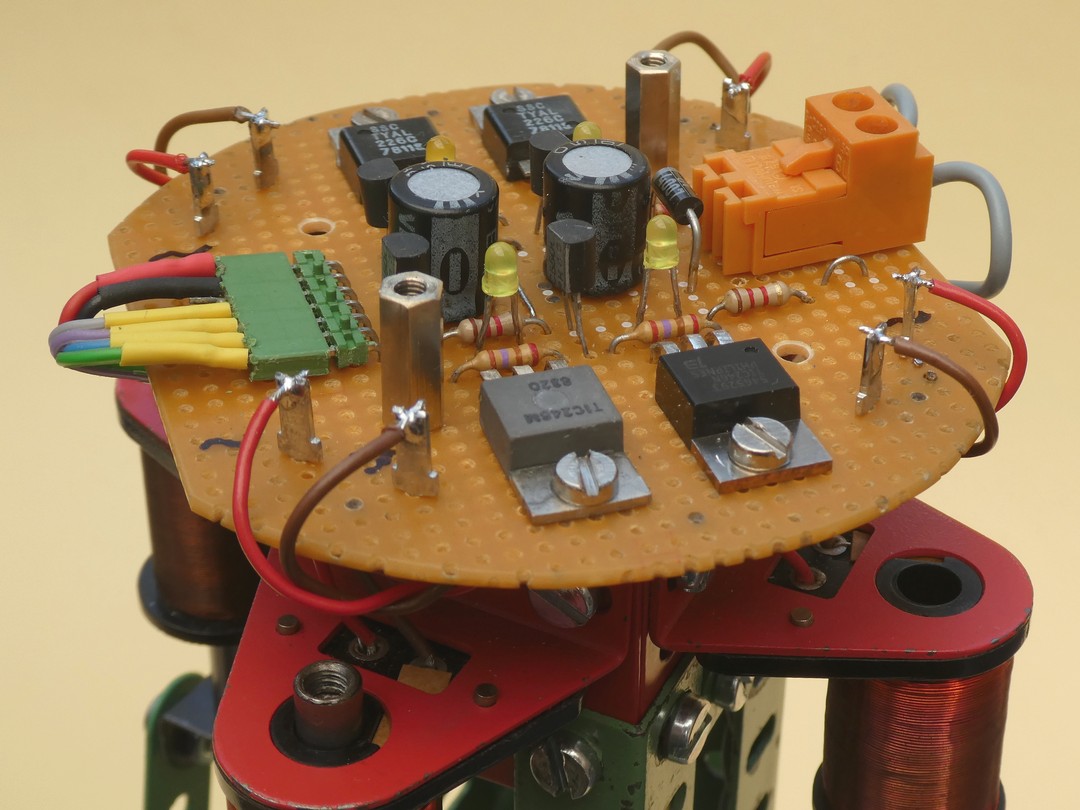
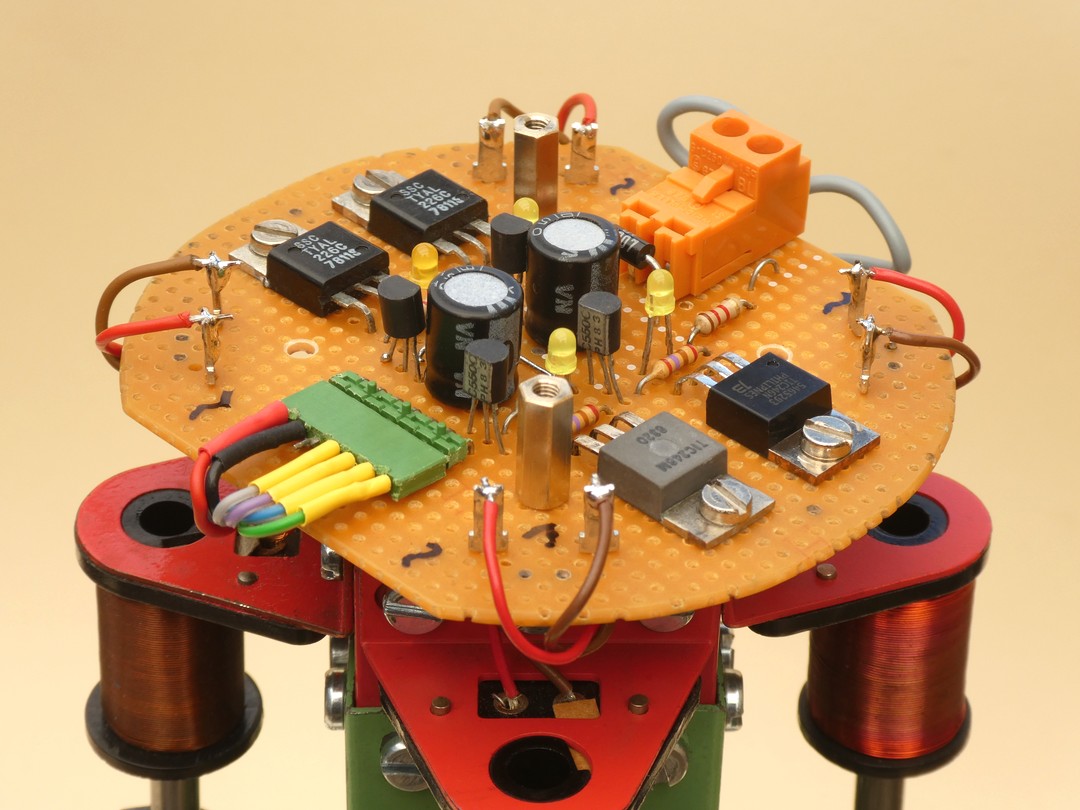
verschleißfreien opto-elektronischen Steuerung der Spulen ausgestattet.
Sie besteht aus einer Sensor-Einheit im Bereich der Ausgangswelle sowie einer Steuer-Einheit im oberen Bereich der Maschine.
Mittels mehrpoliger Kabel werden beide Einheiten steckbar verbunden.

In dieser Position der Steuerscheibe
wird nur die rechte Lichtschranke freigegeben
|
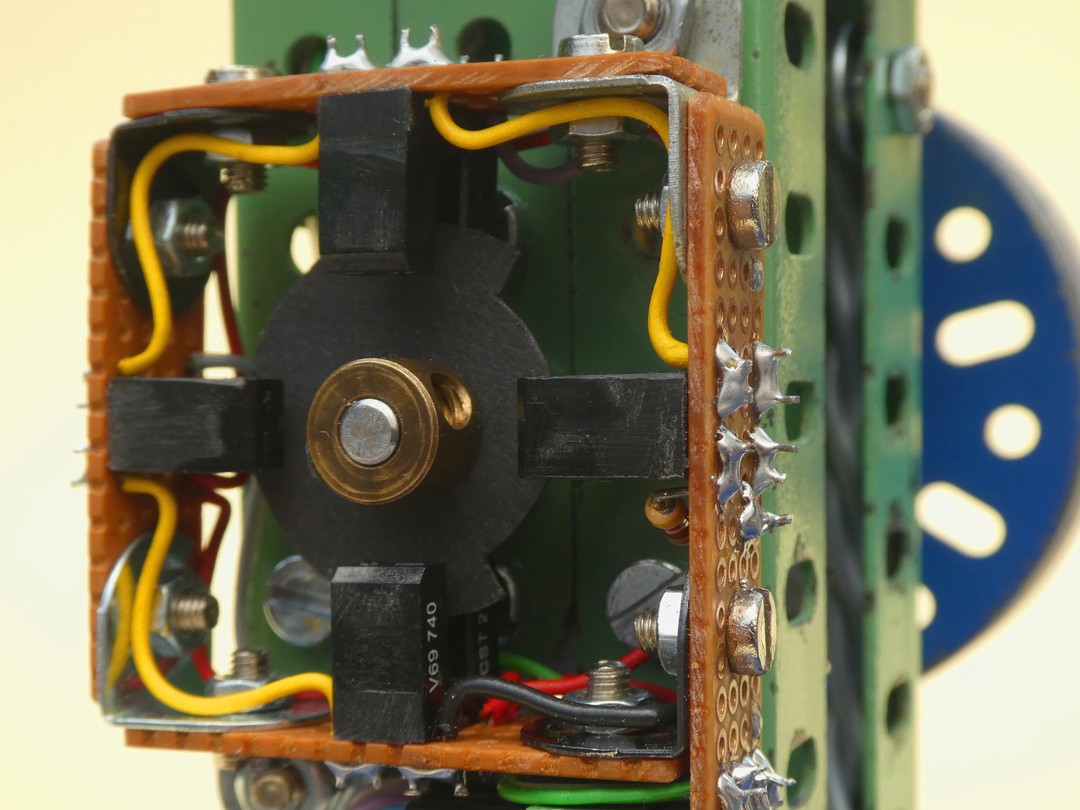
Für die Sensor-Einheit wurde aus Lochraster-Leiterplatten ein quadratischer Rahmen mit den Abmessungen
3 Loch x 3 Loch zur Aufnahme der Gabel-Lichtschranken und Steckverbinder angefertigt.
Die Lichtschranken sind 90° zueinander angeordnet und in deren Zentrum dreht sich eine Steuerscheibe aus
schwarzer Pappe, welche zwischen 2 Stellringen eingeklemmt ist.
Die Steuerscheibe hat einen Durchmesser von etwa 1 Zoll
und eine Aussparung, welche die Lichtschranken für einen Stromflusswinkel von etwa 120° freigibt.
Dadurch werden im Übergangsbereich zweier benachbarter Lichtschranken kurzzeitig 2 Spulen bestromt, was
bei entsprechender Einstellung der Exzenter einen sicheren Anlauf aus jeder Position heraus ermöglicht.
|
Leider beeinträchtigt die Sensor-Einheit in der aktuellen Form das Erscheinungsbild des Motor ganz erheblich
und ob das so bleibt, steht noch nicht fest. Möglicherweise verschwindet sie später unter einer
passenden Abdeckung.
Im Gegensatz zur Steuerung der
2-Zylinder-Dampfmaschine
aus dem Jahr 2008 werden die Spulen nicht mit FETs (Field Effekt Transistor, Feldeffekttransistor),
sondern mit TRIACs (TRIode for Alternating Current, Zweirichtungs-Thyristortriode)
geschaltet.
Das hat den Vorteil, dass der Gleichrichter nicht mit dem Spulenstrom belastet wird und eine einfache
Einweg-Gleichrichtung mit einer Diode 1N400X zur Versorgung des Steuerkreises und Zündung der
TRIACs (ca. 40 mA im 4. Quadranten) ausreicht.
Durch die Einweg-Gleichrichtung haben Wechselstromkreis und Gleichstromkreis außerdem den selben
Bezugspunkt ("Masse"), was den Aufwand ebenfalls reduziert.
|

Die Steuer-Einheit wird von der runden Platte 10395 abgedeckt
|
Allerdings kann der Motor nur mit
Wechselstrom betrieben werden, weil sich TRIACs bei Gleichstrom nicht ohne weiteres wieder sperren lassen.
Nachteilig auswirken könnte sich der Spannungsabfall an den TRIACs von bis zu 2 V. Da der Motor aber bereits ab ca. 8 V
arbeitet, ist das in dieser Anwendung unerheblich.

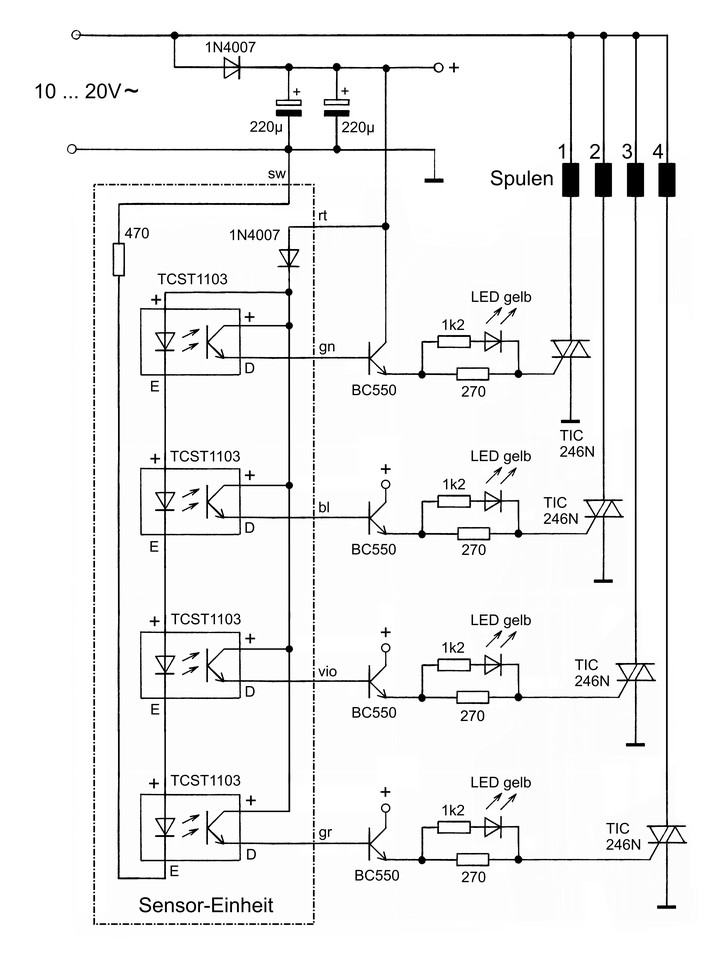
Die Schaltung der opto-elektronischen Steuerung
|
Die Schaltung funktioniert in einem Bereich zwischen ca. 10 V und maximal 20 V Wechselspannung, mit Rücksicht auf die
Erwärmung der Spulen und die Drehzahl des Motors sind 10 bis 12 V aber völlig ausreichend.
Sie wurde bewusst
minimalistisch gehalten und hat dadurch mehrere Unzulänglichkeiten
(fehlende
Spannungsstabilisierung, fehlende Impulsformung, Zündung der TRIACs im 1. sowie im besonders
ungünstigen 4. Quadranten).
Aber sämtliche Bauteile fanden sich noch im häuslichen Bestand und mehr Aufwand wollte ich für
einen ersten Versuch nicht spendieren.
Es gibt lediglich 4 LEDs, um die Zündimpulse für die TRIACs beobachten zu können, sowie einen Verpolungsschutz
in der Sensor-Einheit. Ansonsten bietet die Schaltung keinerlei "Luxus".
|
Trotz der genannten Unzulänglichkeiten arbeitet diese einfache Steuerung bislang einwandfrei.
Die Bestromung der Spulen erfolgt aktuell kreisförmig nacheinander entsprechend der angeordneten Lichtschranken.
Durch Änderung der Zuordnung von Lichtschranken zu Spulen sowie Anpassung der Exzenter kann die Schaltfolge geändert
werden.
Abschließend an dieser Stelle noch ein
Video des aktuellen 4-Zylinder-Polygon-Motors (55s / 15MB)
Home
|